بروزرسانی: 16-6-1397
سيستم کنترل کوادروتور
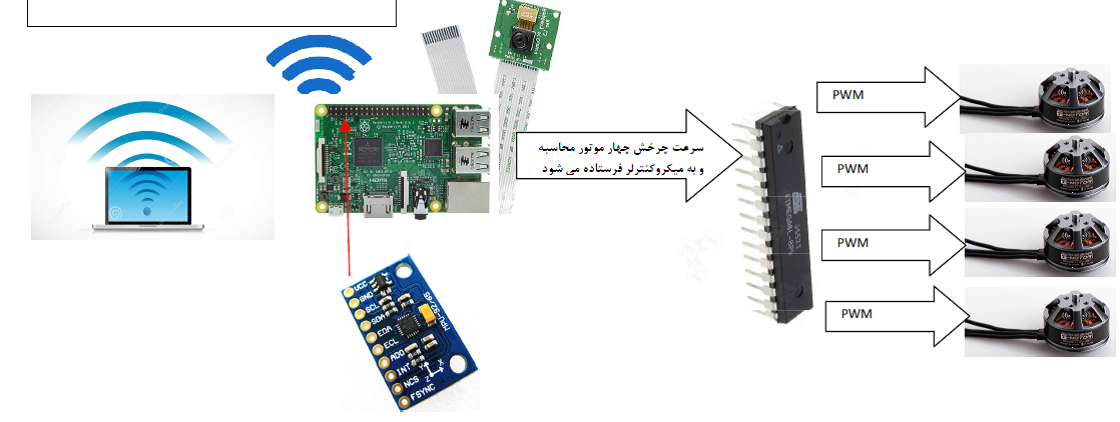
سیستم کنترل روبات کوادروتور (کوادکوپتر) دارای ویژگی هایی شامل قابلیت کنترل از طریق سیمولینک متلب، تخمین مکان و جهت کوادروتور با استفاده از حسگرهای شتاب سنج، ژیروسکوپ و دوربین، و نرخ نمونه-برداری بالای 200 هرتز می باشد. در این سیستم، از طریق سیمولینک، برنامه ساخته می شود و از طریق سیگنال های وای فای به بورد رزبری پای ارسال می گردد. برنامه به صورت مستقل بر روی بورد رزبری پای اجرا می شود. دوربین نیز تصاویر را به بورد رزبری پای می فرستند. سرعت چرخش چهار موتور محاسبه شده و به ریزپردازنده ارسال می شود و واحد IMU اطلاعات ژیروسکوپ و شتاب سنج را به بورد می فرستد.

بازدید امروز: 3